New rig control system provides closed-loop drilling automation

Continued innovation in modeling and algorithm development has led to new process control for the Cyberbase/SDI drilling command center. Collaboration between the International Research Institute of Stavanger AS (IRIS; formerly Rogaland Research) and National Oilwell Varco (NOV) in developing the Drilltronics system led to successful land rig tests in 2006 and to field tests off Norway later this year.
The general concept of the Drilltronics system is to monitor and control the drilling process using continuously updated models for better control, efficiency, and safety. Continuous diagnostic control allows early detection of emerging problems via a set of alarms. The Drilltronics system calculates drilling limits and enforces them in real-time.
Current automated functionalities include automated tripping and reaming control, automated and optimized pump-buildup control, automated well friction test (pick up/rotation/slack off), bit-load optimization (continuous drill-off), and stick slip prevention (Fig. 1). The Drilltronics system also provides diagnostics for hole cleaning, stuck pipe, pressure, pit volume, cuttings buildup, and torque and drag.

It is an “intelligent” system that takes drilling data and immediately optimizes performance with integrated controls, said Fionn Iversen, research advisor and project leader for Drilltronics development at IRIS; the system could “become an integral part of every drilling rig.”
Cyberbase
Drilltronics is designed to work with the current Cyberbase workstation systems.
The Cyberbase operator system was developed by Norway’s Hitec ASA in the 1990s. Cyberbase is a drilling equipment command system enclosed in a driller’s cabin on the drill floor. Cyberbase drillers’ chairs include joysticks and keypads dynamically tied to a set of computer screens, replacing the older system of gauges, lights, and switches.
Hitec had also created an automated system for handling and joining drill pipe and casing, and it collaborated with National Oilwell Inc. in designing the active heave compensated drilling system, which integrated a state-of-the-art computer control system into the drawworks. ActiveHeave compensates for the heaving motion caused by currents, wind, and waves a less-expensive alternative to a more costly passive-motion system.
National Oilwell acquired Hitec in 1999 in a $125-million stock transaction, enhancing its “capacity to provide integrated control systems.”1
In July 2001, National Oilwell put the first completely automated oil drilling equipment into operation near Corpus Christi, Tex., on an electrically powered AC rig drilling for Pioneer Drilling Co. A second automated rig began working in September 2001.
NOV has continued to develop Cyberbase/SDI (smart drilling instrumentation) workstations and told OGJ that it has delivered more than 150 systems worldwide. Currently, there are three versions:
- CB3: Designed for cabins with thin floors (this version has no base); separate chair, PC, and monitors.
- CB4: Designed to be used on traditional drill floor layouts with the cabin on the drill floor level; screen in front.
- CB6: Designed to be used where the cabin is elevated or when it’s necessary to have a line of sight downwards and a wide view to the side; split screens.
In 2006, NOV integrated Sniffer InfiniStream high-speed data logging technology from San Jose, Calif.-based Network General Corp. into Cyberbase. The new technology creates a “drilling flight recorder” that enables real-time, back-in-time, and historical analysis, and allows users to investigate operational anomalies.
New functions can be implemented and control of new machines can be performed remotely without additional hardware. New technology such as the Drilltronics system can be integrated into existing Cyberbase installations. In fact, the Drilltronics system is designed as a seamless retrofit into newbuild rigs with recent NOV Cyberbase control systems. Further development would probably be required to adapt Drilltronics for earlier generation and conventional rigs, according to NOV Stavenger’s vice-pres. of operations, Jan Erik Rugland.
Drilltronics development
In 2001, Statoil supported a feasibility study on smart drilling systems that was conducted by Rogaland Research (now IRIS). The Drilltronics system went into development in 2002, supported by Statoil, ENI, and ChevronTexaco. Demo 2000 work also included NOV sponsorship in the form of hardware and technical support (www.demo2000.no). ChevronTexaco pulled out of the project in 2004, but ENI and Statoil will remain involved through 2007 development, including upcoming testing on a Statoil platform rig in the Statfjord field, said Iversen.
Development of the Drilltronics system resulted from collaboration between IRIS and NOV staff, a “natural extension” of 20 years of cooperation, according to Iversen. The work is coordinated by IRIS, which currently has 13 staff assigned to the project. IRIS project staff includes physicists, mathematicians, and cyberneticians who have developed a good technical understanding of the drilling process, as well as competence in IT, required for integrating model control in the drilling control system. NOV has 6-7 staff participating.
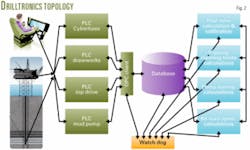
The Drilltronics system has four major elements (Fig. 2):
- Programmable logic controllers to steer the rig machineries, acquire sensor data, and receive commands from the driller.
- A database to exchange data between the different components.
- A set of calculation modules that use the real-time data to estimate the current situation and provide safety margins for operating rig machineries.
- A graphical user interface monitoring drilling data and displaying model calculation results.
The four Drilltronics software components run on separate machines connected via a local area network. In the case of failure, “watch dog” functionality restarts the failing process, as shown in the system topology (Fig. 2).
Drilltronics software is built on open standards. OPC (open connectivity) standards are worldwide specifications (www.opcfoundation.org). There are now hundreds of OPC data access servers and clients.
There are four main automated control modules:
- Tripping and back reaming.
- Friction test (pickup, rotation, slackoff).
- Pump start-up and buildup.
- Bit load optimization (continuous drilloff).
Additionally, a stick-slip prevention module developed by NOV may be included in future but was not tested at the Ullrigg onshore test rig, discussed below.
Process models
Two continuously updated process models form the basis of the control and diagnostic functionality of the Drilltronics system:
- A dynamic well flow model calculates pressure and temperature based on injected flow rate, drillstring movement, and thermal boundary data.
- A string mechanics model calculates string torque, drag, and mechanical friction factor based on surface load and torque measurements and input from the flow model.
The calculation modules are run on a calculation server separate from the Cyberbase/SDI system.
Testing
IRIS demonstrated the automated control functionality of the Drilltronics system at its Ullrigg Drilling and Well Center in Stavanger in 2006. The facility features an onshore, skidable drilling rig (Ullrigg) and seven wellbores (Fig. 3). Team members presented results of the full-scale testing at the American Assoc. of Drilling Engineers annual conference in April 2007 (www.aade.org).2

The experienced rig crew concluded that the new Drilltronics system was “useful and easy to use.”2
The Drilltronics system was also tested passively in the North Sea. The team ran the system against active offshore drilling operations in 2006-07. Testing verified the models of calculated bottomhole pressure, standpipe pressure, and equivalent circulating density.
Applications
The Drilltronics system will be particularly useful in drilling situations that require precise well control, such as managed-pressure drilling, or anywhere it is difficult to remain within pressure limits.
Eric Cayeaux, research advisor at IRIS, told OGJ he envisions it being used where geopressure margins are narrow, such as depleted North Sea fields. “The movement of the drill pipe is important; you want smooth acceleration,” he said.
NOV’s project lead for Drilltronics, Morten Welmer, agreed it’s a “good tool when well limits are tight, especially in combination with other technologies” such as MPD tools. Integrating different drilling systems is valuable, Welmer said.
While the drawworks actively control the drilling speed and the mud pumps adjust strokes and pressure, the new NOV stick-slip system module enables active control of the torque on the pipe through the top drive.
Cayeaux said it will be important to test the system on a floating rig, to work out the heave compensation calculations.
NOV’s Rugland said that after the platform rig tests later this year, the team will test extended functionality of the system at the Ullrigg test site and also on offshore jack ups. He does not expect any tests on floating rigs until 2008 or later.
Future
Phase 2 testing of the Drilltronics system will be completed after a pilot demonstration in the Statfjord field off Norway in second-half 2007, according to Iversen.
Additionally, further development of tools and technologies such as WITSML and wired pipe may benefit Drilltronics interoperability.
Wellsite Information Transfer Standard Markup Language (WITSML) is developing into a standard, international protocol for wellsite data exchange (OGJ, Nov. 10, 2003, p. 49). Although it is used for transferring third-party drilling data, using WITSML for real-time active control does not seem viable, due to time delay. However, Iversen said there is no issue in using WITSML in passive monitoring or diagnostic real-time systems.
At an industry roundtable in December 2005, David A. Archer, president and chief executive officer of the Petrotechnical Open Standards Consortium (POSC, www.posc.org; now Energistics; www.energistics.org), said “While there has been significant progress in industry communication standards, better use of technology is needed to enable integration and fast, effective data-sharing“ (OGJ, Jan. 9, 2006, p. 29).
Downhole data transfer is generally discontinuous and the resolution is 30 sec to 1 min, but wired pipe offers better resolution, about 1 sec.2 The increased resolution allows more frequent updates and better model calibration.
BP’s John Thorogood, chief engineer for Elvary Neftegaz’ Sakhalin exploration program, told OGJ that the Drilltronics system is “potentially the single most powerful breakthrough piece of drilling technology I’ve seen for many years...[holding out] the possibility of creating a dramatic reduction in the risk of human-induced error leading to stuck pipe, downhole problems etc. [It’s] probably the most revolutionary piece of technology since the top drive.”
References
- “National Oilwell Inc.,” www.fundinguniverse.com.
- Iversen, F., Cayeaux, E., Dvergsnes, E.W., Welmer, M., Torsvoll, A., and Merlo, A., “Demonstrating a New System for Integrated Drilling Control,” 2007 AADE National Technical Conf. and Exhibition, Houston, Apr. 10-12, 2007.